
深圳市旗眾智能科技有限公司 視覺點膠系統|點膠軟件|點膠控制系統|輔料貼附系統
13113841868


2025-04-09 02:03:43
六軸機器人的運動能力基于其獨特的運動學設計。它通過六個旋轉關節來實現靈活運動,每個關節都對應一個特定的自由度,這六個自由度相互配合,賦予了機器人在三維空間中近乎無限的運動可能。從機械結構角度看,基座關節提供了機器人的旋轉基礎,使得機器人能夠在水平面上大范圍轉動,如同人的腰部轉動,拓展了作業的覆蓋區域。而肩部關節和肘部關節的協作,類似于人類手臂的屈伸動作,控制著機器人手臂在垂直平面內的上下移動,能夠精細調整工作端到達不同高度位置。腕部的三個關節則負責更為精細的動作,如旋轉、擺動等,讓機器人能夠靈活調整末端執行器的姿態,無論是進行精密裝配,還是復雜的焊接操作,都能輕松應對。這種多關節協同的運動學設計,為六軸機器人在工業生產和其他領域的廣泛應用奠定了堅實基礎。全新升級款裝配機器人HSR-JR607,進一步提高企業生產效率、穩定裝配質量。深圳工業6軸機器人機械手
HSR-JR618光伏機器人:HSR-JR618工業6軸機器人具有精度高、加速能力強、剛性好、防護等級可達IP67等優點,而且手腕結構緊湊,運動范圍較傳統的手腕更大,可輕松應對機床上下料、碼垛、裝配、打磨及焊接等行業的應用市場,有效幫助企業有效提升質量和效率,獲取超預期的經濟收益。運動半徑更大,能夠在很多要求大運動范圍的工況下滿足客戶使用,適應能力強,包括電機以及減速機均較同級別其他國產品牌的工業機器人有相應提升和加大。深圳6軸機器人協作機器人流水線生產線通過視覺定位,實現高精度、強適應性,同時,調機方便、穩定性高。

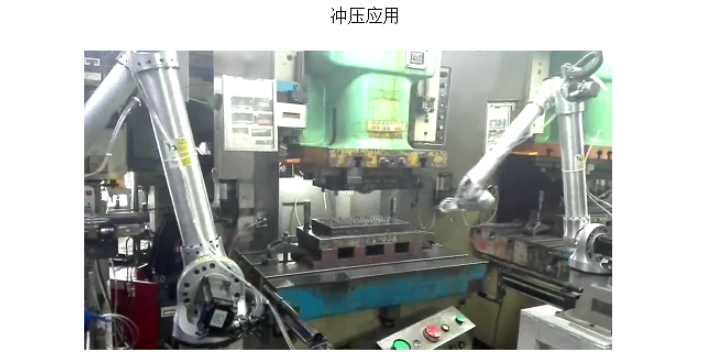
HSR-MD410工業機器人產品特點:1、運動速度快沖壓節拍可高達16次/分,有效提升生產效率。2、運動范圍大工作半徑可達1510mm,可輕松應用于沖床中心距3m的沖壓場合。3、高性價比與6關節機器人對比,該機型采用4關節設計,有效降低投入成本,并可滿足各類搬運應用,4、便捷維護該款機器人結構簡單,采用模塊化部件結構,組合式減速機構,故障維修難度低,可快速故障處理立即恢復生產;5、高可靠性整機采用高性能主要零部件,穩定性、故障率低,為整機提供高可靠性能保證,可長時間持續執行生產任務;6、通用性能強可廣適用于各類行業領域的搬運,如熱鍛、沖壓上下料行業;7、拓展性強可根據實際生產需要,靈活布置和調整生產連線方式,可快速實現柔性化生產及后續方案更改設計及拓展應用;
1、JR680工業機器人特性--高防護針對熱鍛、表面處理、酸洗等粉塵和液體飛濺問題,工業機器人小臂及手腕防護等級達到IP65,防止侵入物對工業機器人本體的損傷。同時由于采用電機后置方案,小臂及手腕無電氣元件,提高了抓取高溫工件的耐熱能力。2、JR680工業機器人特性--高剛性參照國外同類型工業機器人設計方法,并采用有限元等分析計算手段,保證整機結構件具有良好的剛度。同時鑄造結構件全為QT500,在保證足夠剛性的前提下,能夠提供很好的減震性。機器人定位精度是指末端執行器在笛卡爾空間的理論坐標與實際坐標之間的接近程度,定位精度一般在1mm左右。
六軸機器人的編程方式豐富多樣,以滿足不同用戶和應用場景的需求。示教編程是一種較為直觀且常用的方式,操作人員通過手動移動機器人的關節,使其末端執行器按照期望的軌跡運動,同時機器人記錄下這些運動數據,形成相應的程序。這種方式對于一些軌跡不太復雜、操作人員對機器人運動較為熟悉的任務十分適用,例如簡單的物料搬運工作。而離線編程則借助專業的編程軟件,在計算機上創建虛擬的機器人工作環境,通過軟件模擬機器人的運動過程,編寫程序代碼。這種方式的優勢在于可以在不占用實際機器人工作時間的情況下進行編程,**提高了編程效率,并且對于復雜的任務,能夠通過軟件的仿真功能提前發現潛在問題并進行優化,常用于汽車制造中的復雜焊接任務等場景。此外,隨著技術發展,一些六軸機器人還支持基于視覺識別的編程,通過視覺系統識別目標物體,機器人根據視覺信息自動生成運動程序,進一步提升了編程的智能化和便捷性。機器人產線具備可調、快速換模、換線工裝板等優勢,適用多品種小批量柔性生產。深圳桌面式6軸機器人
工業機器人內部軟限位,通過限位開關,可限制機械手和定位軸的軸范圍,軟件限位開關用作工業機器人防護。深圳工業6軸機器人機械手
6軸工業機器人門窗裝配應用案例:本項目采用華數20kg機器人,實現了零件的搬運,產品的拼裝、成品的下線等全工序的自動化。成功取代了以往門窗傳統行業的多人多工位低效率的作業模式,使該行業機器換人的效率及質量優勢發揮明顯。6軸工業機器人電子廠上下料應用案例:本項目采用HSR-JR608工業機器人實現把路由器搬運到指定位置進行檢測的功能,從而取代了人工來進行重復上下料的動作,提高了工作效率的同時也降低了客戶的人工成本。深圳工業6軸機器人機械手






