聯(lián)系方式 | 手機瀏覽 | 收藏該頁 | 網(wǎng)站首頁 歡迎光臨南京研旭電氣科技有限公司

南京研旭電氣科技有限公司 新能源微電網(wǎng)平臺|測試電源與負(fù)載|電機控制平臺|半實物功率模組
18013301253


2025-02-18 01:10:37
電機匝間短路實驗平臺是電力工程與電機設(shè)計領(lǐng)域不可或缺的重要實驗設(shè)施。該平臺專為模擬與檢測電機繞組內(nèi)部可能發(fā)生的匝間短路故障而設(shè)計,通過精確控制實驗條件,如電壓、電流、溫度等,以實現(xiàn)對電機運行狀態(tài)的全方面監(jiān)測與分析。實驗過程中,研究人員可以利用該平臺模擬不同類型的短路場景,如瞬間過流、長期過載或環(huán)境因素導(dǎo)致的絕緣老化等,進(jìn)而觀察并記錄電機性能參數(shù)的變化,如效率下降、溫升異常及振動增加等。這不僅有助于深入理解匝間短路故障的機理,還為電機的優(yōu)化設(shè)計、故障診斷及可靠性提升提供了寶貴的實驗數(shù)據(jù)和理論支持。電機匝間短路實驗平臺還配備了先進(jìn)的數(shù)據(jù)采集與分析系統(tǒng),能夠?qū)崟r捕捉并處理實驗數(shù)據(jù),提升了研究的準(zhǔn)確性和效率,是推動電機技術(shù)進(jìn)步的關(guān)鍵工具之一。電機控制可以通過控制電機的電流和電壓的波形和頻率來實現(xiàn)電機的電磁防護(hù)控制和電磁屏蔽控制。電機軟啟動供應(yīng)商
電機對拖控制技術(shù)在工業(yè)自動化領(lǐng)域中扮演著至關(guān)重要的角色,它主要通過兩臺或多臺電機相互耦合、協(xié)同工作,實現(xiàn)精確的力平衡、速度同步或位置控制。這種技術(shù)普遍應(yīng)用于測試系統(tǒng)、模擬加載、高精度機床以及電動汽車動力系統(tǒng)測試等場景中。在測試系統(tǒng)中,電機對拖控制能夠模擬實際工作條件,對被測試電機施加動態(tài)負(fù)載,評估其性能參數(shù)如效率、扭矩輸出及熱管理能力,為產(chǎn)品優(yōu)化提供可靠數(shù)據(jù)支持。同時,在電動汽車的驅(qū)動系統(tǒng)開發(fā)中,通過對拖測試可以模擬車輛行駛中的各種工況,驗證電機控制策略的有效性和驅(qū)動系統(tǒng)的耐久性,確保車輛在實際使用中的**性和可靠性。電機對拖控制技術(shù)的精確性、靈活性和高效性,使其成為推動現(xiàn)代工業(yè)制造與交通領(lǐng)域技術(shù)創(chuàng)新的關(guān)鍵力量。海南有刷直流電機電機控制算法調(diào)整,優(yōu)化動態(tài)性能。

永磁同步電機(PMSM)作為高性能電機領(lǐng)域的佼佼者,其無位置傳感器控制技術(shù)近年來備受關(guān)注。這項技術(shù)通過算法估算電機的轉(zhuǎn)子位置和速度,摒棄了傳統(tǒng)的機械式位置傳感器,如編碼器或霍爾元件,從而簡化了電機結(jié)構(gòu),降低了系統(tǒng)成本,并提高了系統(tǒng)的可靠性和魯棒性。在無位置傳感器控制中,重要在于準(zhǔn)確且實時地估算電機的電磁狀態(tài),這通常依賴于電機的電壓、電流等電氣量以及電機的數(shù)學(xué)模型。通過先進(jìn)的控制算法,如擴展卡爾曼濾波器(EKF)、滑模觀測器(SMO)或模型參考自適應(yīng)控制(MRAC)等,能夠?qū)崿F(xiàn)對電機狀態(tài)的精確估計,進(jìn)而實現(xiàn)高精度的轉(zhuǎn)矩和速度控制。隨著人工智能和機器學(xué)習(xí)技術(shù)的不斷發(fā)展,基于數(shù)據(jù)驅(qū)動的無位置傳感器控制方法也逐漸興起,為永磁同步電機的智能化控制開辟了新路徑。這些技術(shù)的應(yīng)用,不僅推動了電機控制技術(shù)的革新,也為電動汽車、工業(yè)自動化、航空航天等領(lǐng)域的發(fā)展注入了新的活力。
在無刷直流電機(BLDC)控制領(lǐng)域,無位置傳感器控制技術(shù)是一項重要且前沿的技術(shù)。該技術(shù)通過高級算法和信號處理手段,實現(xiàn)了對電機轉(zhuǎn)子位置的間接檢測,從而省去了傳統(tǒng)物理位置傳感器的使用。這一創(chuàng)新不僅簡化了電機結(jié)構(gòu),降低了系統(tǒng)成本,還提高了系統(tǒng)的可靠性和環(huán)境適應(yīng)性。無位置傳感器控制依賴于電機本身的電氣特性,如反電動勢(BEMF)或電流波形,通過實時監(jiān)測這些信號并應(yīng)用如滑模觀測器、擴展卡爾曼濾波器或模型參考自適應(yīng)控制等算法,精確估算出轉(zhuǎn)子的位置與速度。這種控制方法使得無刷直流電機在電動汽車、家電、工業(yè)自動化等多個領(lǐng)域得到普遍應(yīng)用,推動了電機控制技術(shù)的進(jìn)一步發(fā)展與進(jìn)步。電機控制參數(shù)優(yōu)化,確保穩(wěn)定運行。
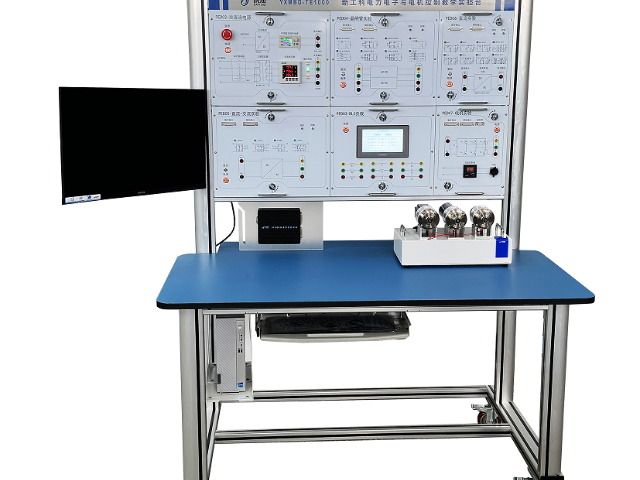
電機實驗平臺作為電氣工程、自動化控制及機電一體化等領(lǐng)域的重要教學(xué)與研究工具,集成了高度靈活性與多功能性于一身。該平臺通過模塊化設(shè)計,能夠支持多種類型電機的測試與控制,包括但不限于直流電機、交流電機、步進(jìn)電機以及伺服電機等,為學(xué)者與學(xué)生提供了一個全方面探索電機原理、性能分析、控制系統(tǒng)設(shè)計的實驗環(huán)境。它不僅配備了先進(jìn)的數(shù)據(jù)采集與處理系統(tǒng),能夠?qū)崟r監(jiān)測電機運行狀態(tài)下的電壓、電流、轉(zhuǎn)速、轉(zhuǎn)矩等關(guān)鍵參數(shù),還通過軟件界面友好地展示實驗數(shù)據(jù),便于用戶直觀理解電機特性與控制算法的效果。電機實驗平臺還具備可擴展性,用戶可根據(jù)研究需要自由組合實驗?zāi)K,進(jìn)行復(fù)雜系統(tǒng)級實驗,極大地促進(jìn)了創(chuàng)新思維與實踐能力的提升。總之,該平臺是推動電機技術(shù)教學(xué)與研究發(fā)展的重要載體,為培養(yǎng)高素質(zhì)工程技術(shù)人才提供了強有力的支持。電機控制硬件優(yōu)化,降低發(fā)熱量。電機軟啟動供應(yīng)商
電機控制技術(shù)的進(jìn)步,推動了工業(yè)自動化的發(fā)展。電機軟啟動供應(yīng)商
三相電機作為工業(yè)驅(qū)動領(lǐng)域的重要組件,其高效、穩(wěn)定的控制對于保障生產(chǎn)線的順暢運行至關(guān)重要。在三相電機控制系統(tǒng)中,通過精確調(diào)節(jié)三相電流的幅值、頻率及相位差,實現(xiàn)對電機轉(zhuǎn)速、轉(zhuǎn)矩及運行方向的精確控制。這一過程通常依賴于變頻器或逆變器等電力電子器件,它們能將固定頻率的交流電轉(zhuǎn)換為可調(diào)頻率的交流電,以滿足不同工況下電機對電能的需求。先進(jìn)的控制算法如矢量控制(FOC)或直接轉(zhuǎn)矩控制(DTC)的應(yīng)用,進(jìn)一步提升了三相電機控制的動態(tài)響應(yīng)速度和穩(wěn)態(tài)精度,使得電機能夠在寬調(diào)速范圍內(nèi)保持高效率運行,同時降低能耗和減少機械應(yīng)力,延長電機使用壽命。因此,三相電機控制技術(shù)的持續(xù)創(chuàng)新與優(yōu)化,不僅推動了工業(yè)自動化水平的提升,也為節(jié)能減排、綠色生產(chǎn)提供了有力支持。電機軟啟動供應(yīng)商







